
ต่างจากวิธีการต้านทาน วิธีแรงดันไฟฟ้าเกี่ยวข้องกับการเปลี่ยนแปลงแรงดันไฟฟ้าขณะควบคุมเพื่อควบคุมแรงดันไฟฟ้าและกระแสเกิน มีสองวิธีในการเปลี่ยน แรง ดันไฟฟ้าในการขับเคลื่อน ประการแรกคือการบรรลุการเปลี่ยนแปลงโดยการแบ่งแรงดันไฟฟ้าในการขับเคลื่อนผ่านตัวต้านทาน และอีกอย่างคือการเปลี่ยนสัญญาณเอาท์พุตในชิปควบคุม (DSPFPGA) แล้วแปลงเป็นสัญญาณอะนาล็อกผ่านชิป D/A เพื่อเปลี่ยนการขับขี่ แรงดันไฟฟ้า. แผนผังของการควบคุมกระบวนการสำหรับการเปิดวิธีแรงดันไฟฟ้าแสดงในรูปที่ 2 และรูปคลื่นการทดลองจะแสดงในรูปที่ 2

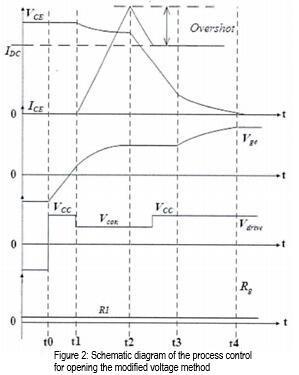
วิธีการควบคุมสำหรับกระบวนการเปิดของวิธีแรงดันไฟฟ้าและวิธีการต้านทานนั้นโดยพื้นฐานแล้วจะเหมือนกัน ขั้นตอนการควบคุมจะเหมือนกัน เริ่มตั้งแต่การเพิ่มขึ้นของ ICE และสิ้นสุดด้วยกระแสการกู้คืนแบบย้อนกลับของไดโอดย้อนกลับของทรานซิสเตอร์ตัวบน
อย่างไรก็ตามวิธีการใช้แรงดันไฟฟ้าคือการเปลี่ยนตัวต้านทานการขับเคลื่อน
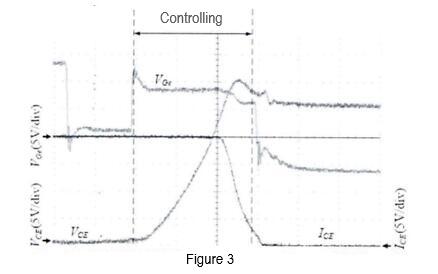
แผนผังของการควบคุมกระบวนการปิดระบบด้วยแรงดันไฟฟ้าแสดงในรูปที่ 4 และรูปคลื่นการทดลองจะแสดงในรูปที่ 3
รูปที่ 3: รูปคลื่นการทดลองของกระบวนการสวิตชิ่งโดยใช้วิธีแก้ไขแรงดันไฟฟ้า (การสลับไดรฟ์จาก -10V เป็น 2.5V)
รูปที่ 4 แผนผังของการควบคุมกระบวนการปิดระบบด้วยวิธีแรงดันไฟฟ้า
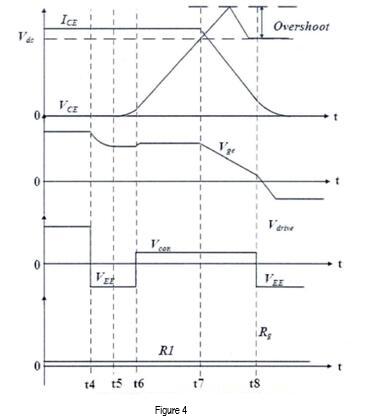
เช่นเดียวกับวิธีการต้านทาน วิธีแรงดันไฟฟ้าจะถูกควบคุมจาก VCE ที่เพิ่มขึ้นในระหว่างกระบวนการปิดเครื่อง จนกระทั่ง ICE จะลดลงจนใกล้ศูนย์และสิ้นสุดการควบคุม
ข้อดีของการเปลี่ยนวิธีแรงดันไฟฟ้าเป็นการขับขี่แบบหลายขั้นตอนได้มีการพูดคุยกันโดยละเอียดก่อนหน้านี้ และข้อเสียก็คล้ายกับการเปลี่ยนวิธีต้านทาน ด้านล่างนี้เป็นข้อเสีย:
1: มีสองวิธีที่มีอยู่สำหรับการเปลี่ยนแรงดันไฟฟ้าในการขับเคลื่อนในระหว่างขั้นตอนการควบคุม วิธีหนึ่งคือการเปลี่ยนแรงดันไฟฟ้าในการขับเคลื่อนโดยการสลับตัวต้านทานตัวแบ่งแรงดันไฟฟ้าผ่านสวิตช์ (MOSFET) อีกวิธีหนึ่งคือการเปลี่ยนแรงดันไฟฟ้าขณะขับผ่านชิป D/A แบบแรกมีปัญหาเช่นเดียวกับวิธีการควบคุมแรงดันไฟฟ้า โดยแยกสัญญาณของสวิตช์ควบคุมออกจากวงจรไฟฟ้าได้ยาก และสัญญาณรบกวนจากวงจรไฟฟ้าจะได้รับผลกระทบจากสัญญาณได้ง่าย อย่างหลังมีปัญหาในการเพิ่มต้นทุนและความซับซ้อนของวงจรของชิป D/A ในขณะเดียวกันก็เพิ่มความล่าช้าของวงจรควบคุมและ
ส่งผลต่อการควบคุมป้อนกลับ
ประเด็นที่สองคือการควบคุมผลป้อนกลับในระหว่างกระบวนการเปิดใช้งานนั้นทำได้ยาก เช่นเดียวกับการเปลี่ยนวิธีการต้านทาน การควบคุมจะต้องเริ่มจากช่วงเวลาที่ ICE เริ่มขึ้น มิฉะนั้นจะมีสองสถานการณ์: 1. หากแรงดันไฟสูงเช่นเดียวกับการเปลี่ยนวิธีต้านทาน ICE โอเวอร์ชูตก็จะสูงขึ้น หากแรงดันไฟฟ้าในการขับเคลื่อนต่ำ จะทำให้ ICE ลดลงและอาจส่งผลให้ IGBT ปิดโดยไม่ได้ตั้งใจ การวิเคราะห์เหตุผลเฉพาะ:
แบบจำลองที่เทียบเท่าของวงจรขับเคลื่อน IGBT ในขั้นตอนนี้เหมือนกับแบบจำลองที่เทียบเท่าในการวิเคราะห์ข้อบกพร่องของวิธีต้านทานแบบดัดแปลง ดังแสดงในรูปที่ 2.20 เนื่องจาก Rg มีขนาดเล็ก Ig จึงมีขนาดใหญ่
กว่า IgC มาก ดังนั้น เมื่อวิเคราะห์ข้อบกพร่องในวิธีแก้ไขแรงดันไฟฟ้า อิทธิพลของ IgC จึงสามารถละเลยได้ ซึ่งช่วยลดความซับซ้อนของโมเดลที่เทียบเท่าและต้องใช้เพียงวงจรขับเคลื่อนเท่านั้น เนื่องจาก Rg มีขนาดเล็ก จึงจำเป็นต้องคำนึงถึง
การมีอยู่ของ Lg ตัวเหนี่ยวนำปรสิตในวงจรการขับขี่ แบบจำลองอย่างง่ายแสดงในรูปที่ 5
รูปที่ 5 แบบจำลองอย่างง่ายสำหรับขั้นตอนการควบคุมกระบวนการเปิดวิธีแรงดันไฟฟ้า
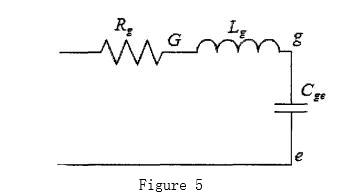
หากแรงดันไฟฟ้าขณะควบคุมสูง จะต้องใช้เวลาช่วงหนึ่ง (ประมาณสิบ ns) กว่า Ig จะลดลงเนื่องจากมี Lg ตัวเหนี่ยวนำปรสิตอยู่ในวงจรขับเคลื่อน ในขั้นตอนนี้ Vge จะยังคงเพิ่มขึ้นในอัตราที่เร็วขึ้น ดังนั้นจึงไม่สามารถลดโอเวอร์ช็อตของ ICE ที่ต่ำมากได้ หากคุณต้องการควบคุม ICE โอเวอร์ชูตที่ต่ำมาก คุณต้องลดแรงดันไฟฟ้าในการขับเคลื่อนให้ต่ำมาก แม้จะต่ำกว่า Vge ปัจจุบันด้วยซ้ำ สิ่งนี้จะทำให้ ICE ลดลงและทำให้เกิดการปิดเครื่องที่ผิดพลาด ซึ่งจะส่งผลต่อการทำงานปกติของ IGBT เพื่อให้ IGBT ทำงานได้ตามปกติ แรงดันไฟขณะควบคุมควรมากกว่า Vge ก่อนการควบคุมเป็นอย่างน้อย ซึ่งจะป้องกันไม่ให้ ICE โอเวอร์ช็อตลดลงเหลือระดับที่ต่ำกว่า ดังนั้นจึงจำเป็นต้องเหลือส่วนต่างกระแส IGBT ขนาดใหญ่ไว้ในการออกแบบวงจร
ประเด็นที่สามคือ เป็นการยากที่จะเปลี่ยนแรงดันไฟฟ้าขับเคลื่อน Vcom ในระหว่างขั้นตอนการควบคุม และไม่สามารถบรรลุผลการควบคุมที่แตกต่างกัน (แรงดันไฟฟ้าและกระแสเกินที่แตกต่างกัน) วรรณกรรมบางเรื่องเสนอวิธีการเพิ่มชิป D/A ให้กับวงจรควบคุมดิจิทัลเพื่อเปลี่ยน Vcom อย่างไรก็ตาม สิ่งนี้ไม่เพียงแต่เพิ่มต้นทุน แต่ยังเพิ่มความล่าช้าของวงจรควบคุม ซึ่งอาจนำไปสู่การควบคุมที่ไม่ถูกต้องหรือไร้ประสิทธิผลด้วยซ้ำ ไม่สามารถถือเป็นวิธีการที่ดีและไม่สามารถนำไปใช้ในทางปฏิบัติได้
หมวดหมู่
ล่าสุด โพสต์








สแกนไปที่ WeChat:everexceed















